 |
第1069号(平成18年3月20日) |

18
免荷式歩行トレーニングとCPG
〈日本リハビリテーション医学会〉

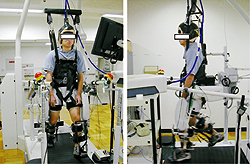
| 図 Lokomatを用いた免荷式歩行トレーニングの基礎実験風景 |
 |
動物としてのヒトは二足歩行を獲得したが,ヒトに限らず動物の移動活動の詳細な機序は不詳のままである.自分の足で移動できなくなった動物は生存の危機を迎えるが,人間は車椅子や自動車を前足である上肢で操作して,移動能力を再獲得できることもある.それでも,自らの足で歩きたい願望は持続することが多い.
脊髄損傷による対麻痺で試みられた免荷(体重支持)トレッドミル歩行訓練は,予想以上の歩行機能回復を獲得し得ることが明らかになり,脳卒中やパーキンソン病など中枢性運動障害でも試みられ,歩行の神経制御機構に関する研究も賦活させている.
初期の免荷トレッドミル歩行訓練は,二名の介助者が患者の片足をそれぞれ介助してトレッドミルの速度に合わせて交互性ステップを生み出すものであり,治療者にはかなりの重労働を課したが,最近はロボット技術を応用した訓練機器(Lokomatなど)が開発されている(図).
一方,陽性支持反応を緩和し,交互歩行パターンを訓練するのに適切な免荷の程度はあいまいで,完全に懸垂しての歩行や水中での歩行訓練でも応用され,ステップを介助する訓練のプロトコルは定まっていない.ここで,ヒトの歩行に関する神経制御機構の解明という課題に突き当たる.
対麻痺で車椅子を操作して社会的経済的に自立していても,脊髄再生や機能再建のニュースに接すると心が揺らぐ.最新の話題は,神経細胞の再生シグナルを神経軸索断端からの遺伝子導入によって活性化し,軸索伸長を促進させたり,軸索再生の足場としてグリア細胞への遺伝子導入や神経幹細胞を利用して最適な表現形を持つ細胞を損傷部に誘導したりする研究が進行している.しかし,脳から脊髄での歩行制御に関する神経経路は不詳であり,仮説すら未確立では,機能回復に結び付けることは望めない.
神経生理学が活発に展開した一九六〇年代に,移動活動に関する中枢パターン発生器(CPG:central pattern generator)の存在が想定されるようになった.近年は,ヒトの歩行CPGも研究され,脊髄に広範に分布する神経回路からなり,時空間的にパターン化した入力を継続的に受けることにより,入出力特性が変化すると考えられている.
【参考文献】
一,Nakazawa K, et al: Experimental Brain Research 157: 117-123, 2004.
二,Thomas SL, et al: J Neurophysiol 94: 2844-2855, 2005.
(日本リハビリテーション医学会理事長・国立身体障害者リハビリテーションセンター病院長 江藤文夫)
|
